团队2021级研究生薛昆仑同学的论文“A SLAM Method Based on ORB-SLAM3 Which Mixed GNSS Data”被“In 6th International Conference on Information Technologies and Electrical Engineering”录用,祝贺!
Abstract:
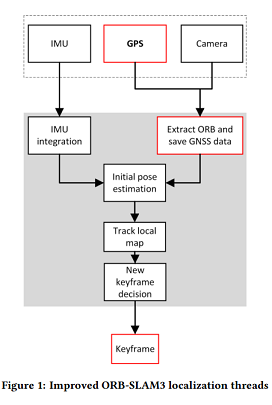
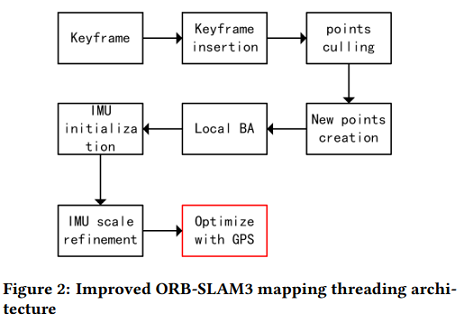
Traditional single-sensor SLAM methods suffer from cumulative drift errors in large-scale outdoor environments, which makes it difficult to have good localization accuracy in practical application scenarios. In this paper, to solve the above problems, we propose a visual inertial system fusion method with global navigation satellite system (GNSS), which transforms GNSS measurements into values in Cartesian coordinate system, and then uses odometry pose information and GNSS information to do nonlinear optimization to eliminate the cumulative drift error within the system, and experiments are carried out on the KITTI raw data, which show that the method proposed in this paper effectively improves the localization accuracy in large-scale outdoor environments. The results show that the method proposed in this paper effectively improves the localization accuracy in outdoor large-scale scenarios, and the localization accuracy on the KITTI dataset is 54% higher than that of ORB-SLAM3 on average.
Download: [官方链接]
Keywords: Simultaneous localization and mapping, Multi-source mixed, Automatic driving, Nonlinear optimization
Photos: